Customised Brick 1.0
Robotic Hotwire Cut Pavilion
Aarhus School of Architecture, Aarhus, Denmark
2016
Robotic fabrication has become a true physical manifestation of the digital era. It gives certain degree of freedom in terms of fabrication. We had used this degree of freedom in this workshop to make a pavilion made up of 112 uniquely shaped bricks by a team of 8 students with dedicated tasks. EPS blocks were cut using 2 ABB IRB 120 and custom hotwire end effector over 3 days and assembled in place.
For the software part, we had used custom written RAPID generator housing Lobster by Daniel Piker, Mussel by GreyShed (Ryan Luke Jones) and compiled by Ryan Hughes. The workshop was taught by Urvi Sheth, workshop director of CEPT University, India and Niels Martin Larsen, Professor at Aarhus School of Architecture, Denmark.
I, as a participating student, wanted to contribute in the workshop that brings some particular value. The bricks needed to be cut through a hotwire setup and all the surfaces had to be ruled in order to achieve that. Now each brick is fabricated with 2 pass of the robot taking 4 curves for each brick. My contribution was in form of a grasshopper script: It would take one brick; place it on the working plane; extract the 4 curves and automate the .mod file generation to generate the RAPID code. I had added this part of the code in addition to the code written by Ryan Hughes, erstwhile Robot lab director at Aarhus School of Architecture.
Base Surface :
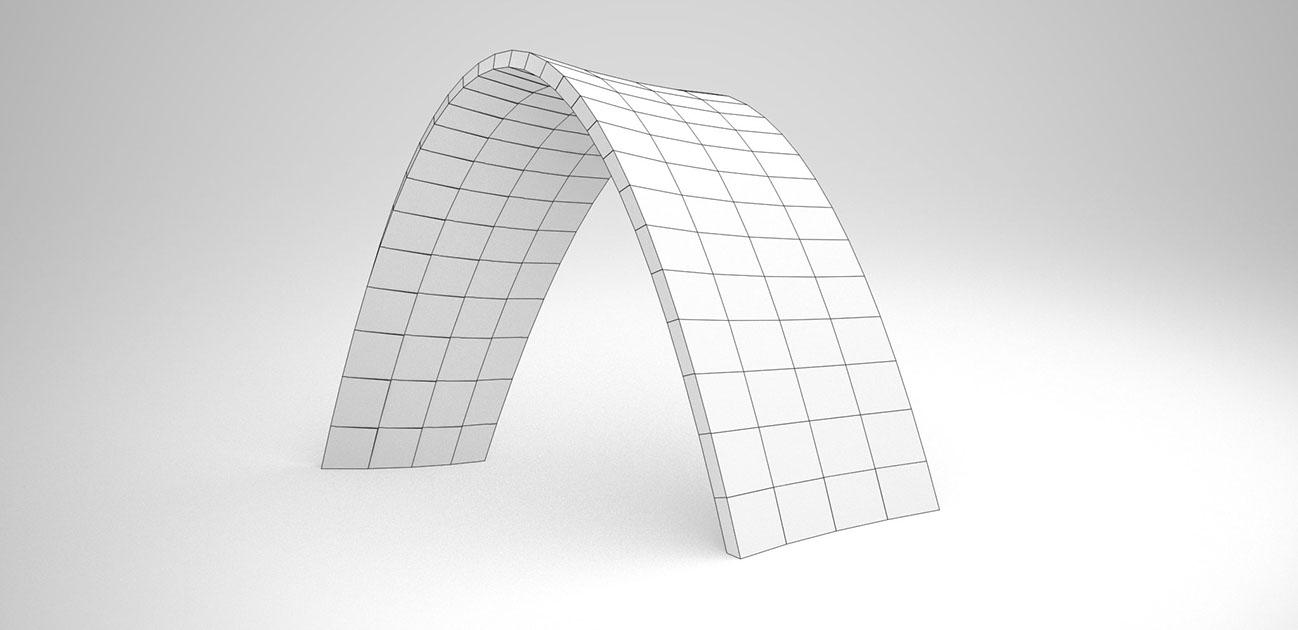
In the workshop process we had selected a simple vaulted surface from one student Nikals Frandsen and made that particular surface tessellated and converted into blocks
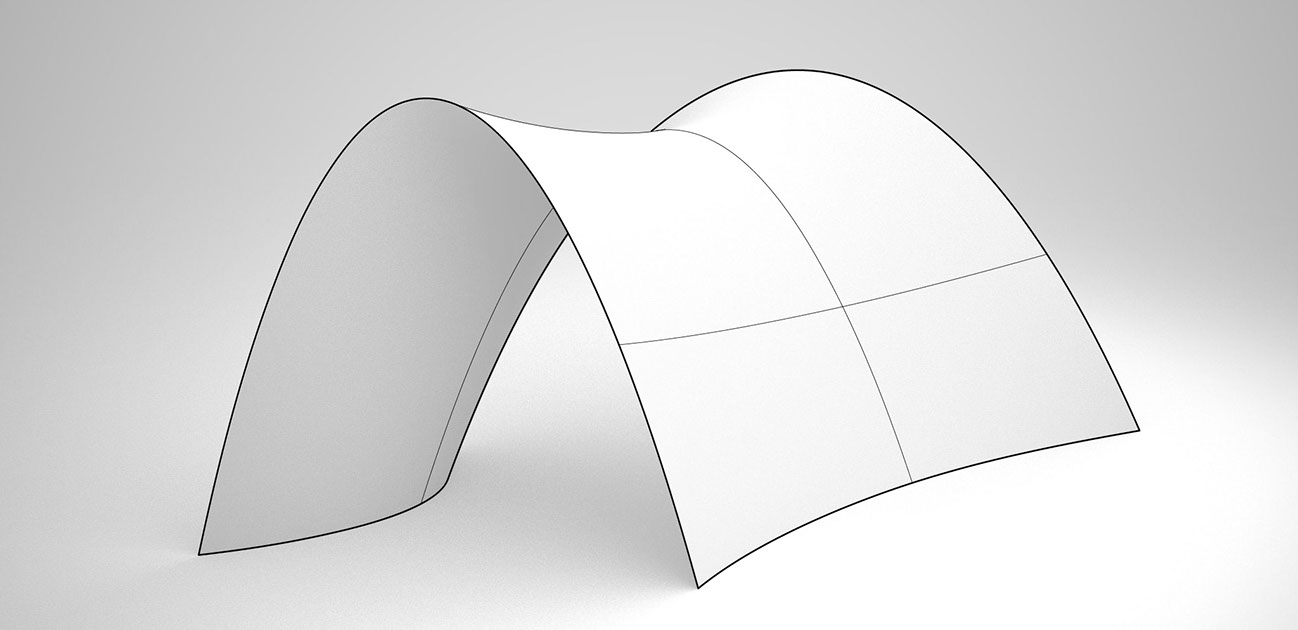
Base Surface | Prepared for tessellation
The surface was divided into a grid of 28 X 12. It was made sure that all 6 sides of the brick are ruled and one surface per brick is planar. The strategy is demonstrated afterwards.
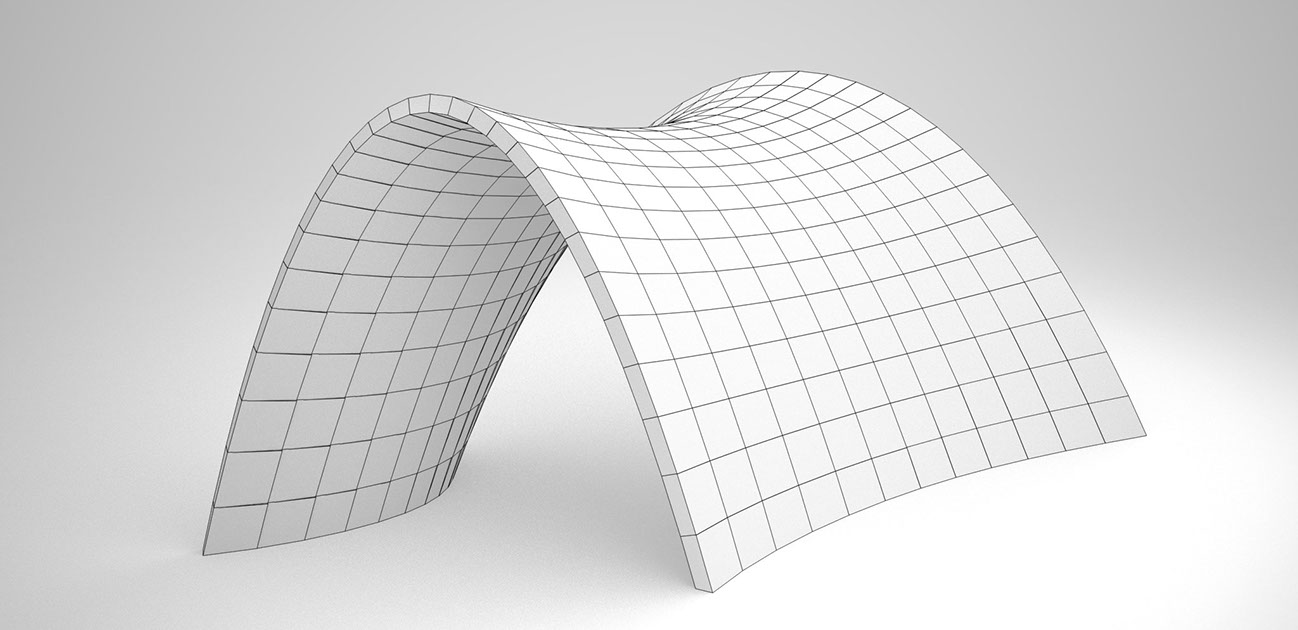
Tessellated Surface | 28 X 12 Grid
Taking the faces on interior side the following logic was applied.
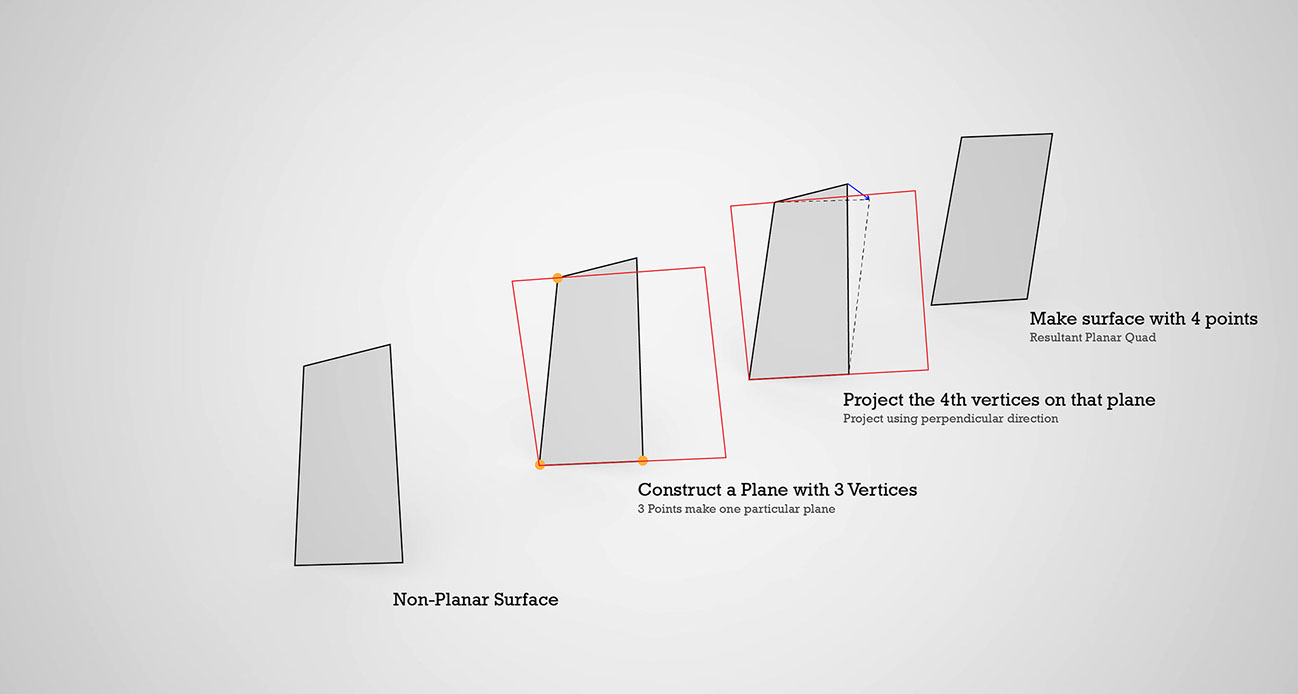
Surface Planarizationa Logic
Intended deformation in the interior part
Due to time constrain, we decided to fabricated only a part of the tessellation. 4 Columns.
Part to be fabricated
Robot Setup:
We had used 2 similar ABB IRB 120 robot setup to cut a total of 112 no of bricks
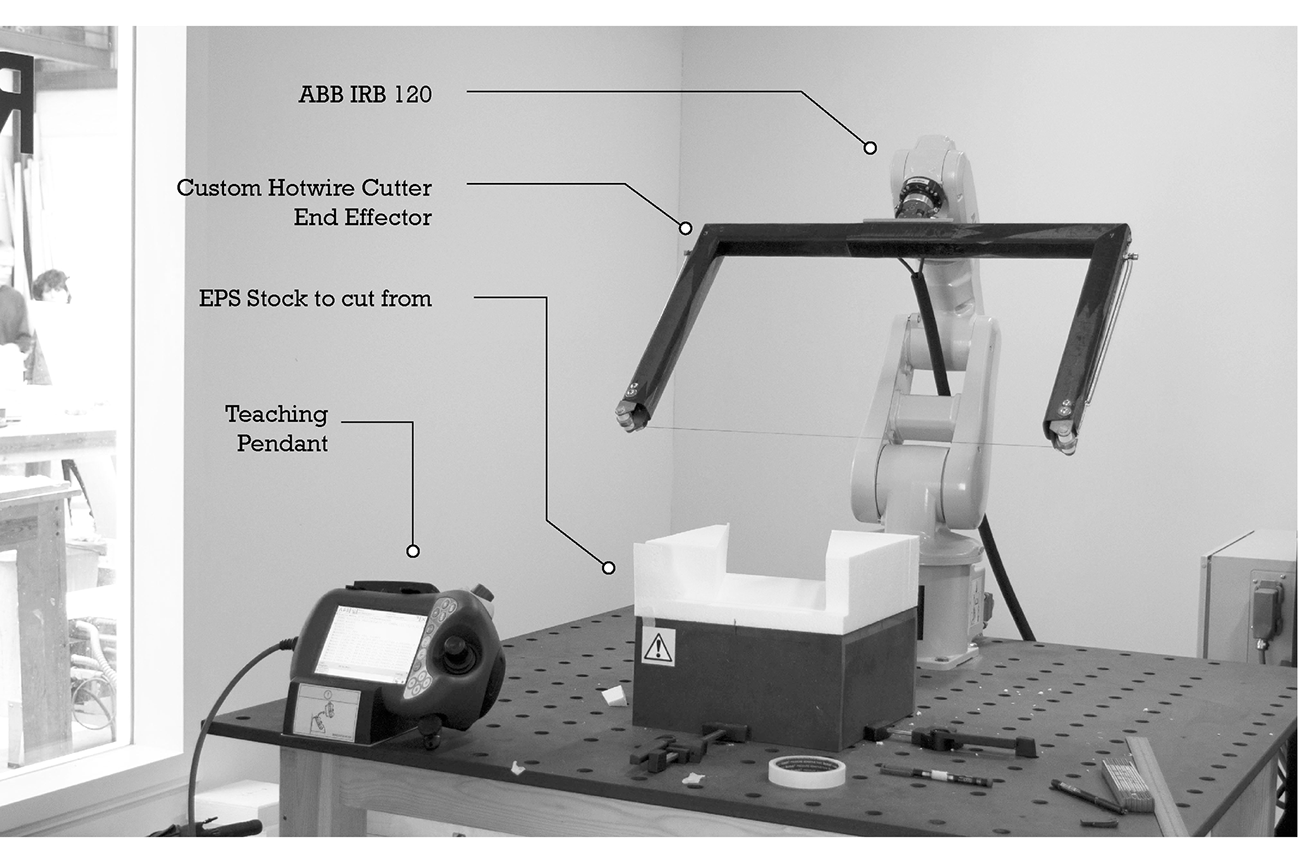
Robot Setup at Aarhus School of Architecture, Robot Lab
6 Side Finish Setup:
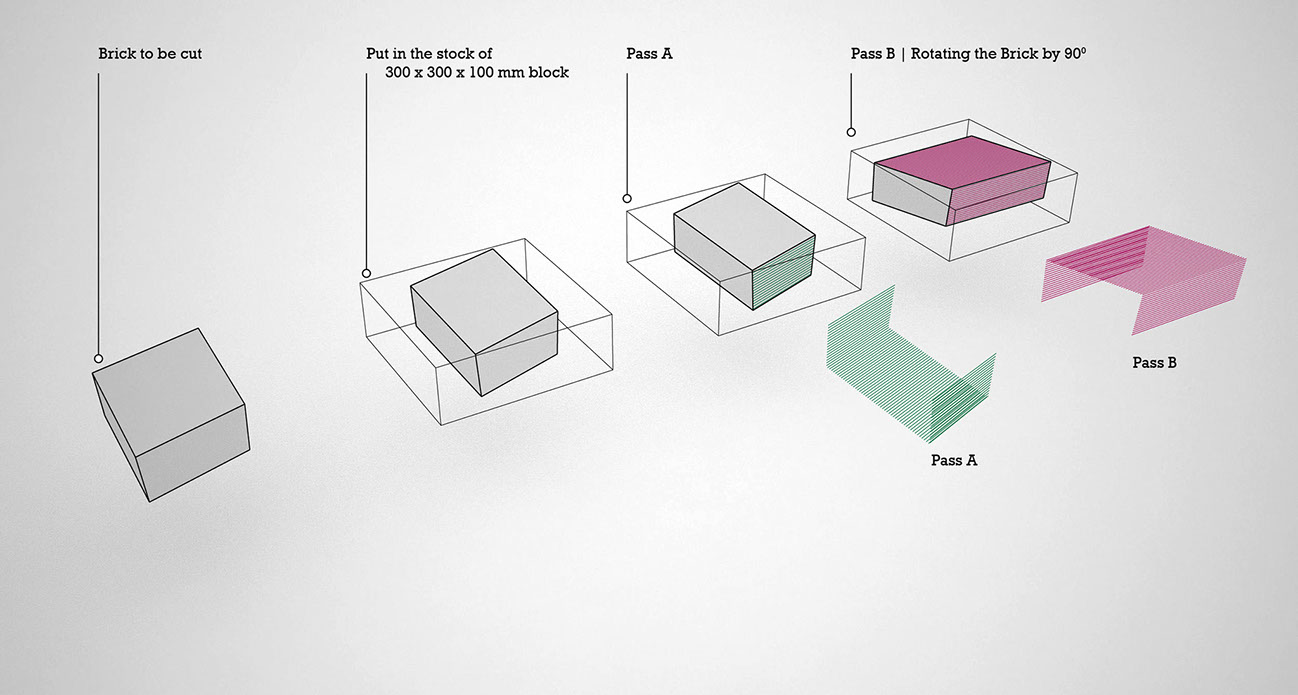
Brick making process from a EPS block
Fabrication and Assembly:
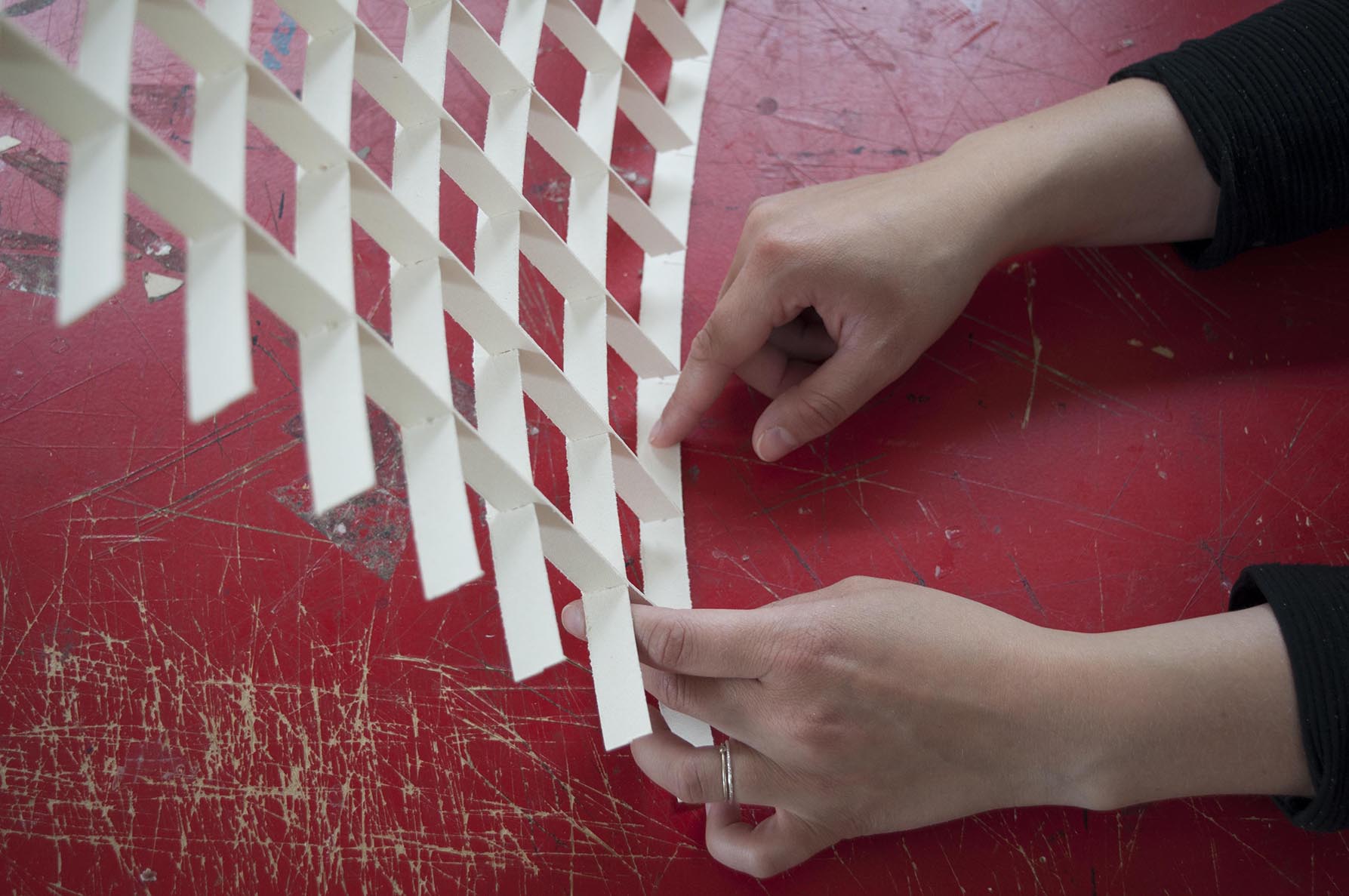
Before the robotic fabrication of the bricks, we made a waffle grid structure of the whole setup to understand the angle between the bricks the complexity. It was cut from .8mm board using a Zund Knife cutter. This cutting and assembly was done by Ida and Karoline while I developed the waffle and produced the fabrication drawing.
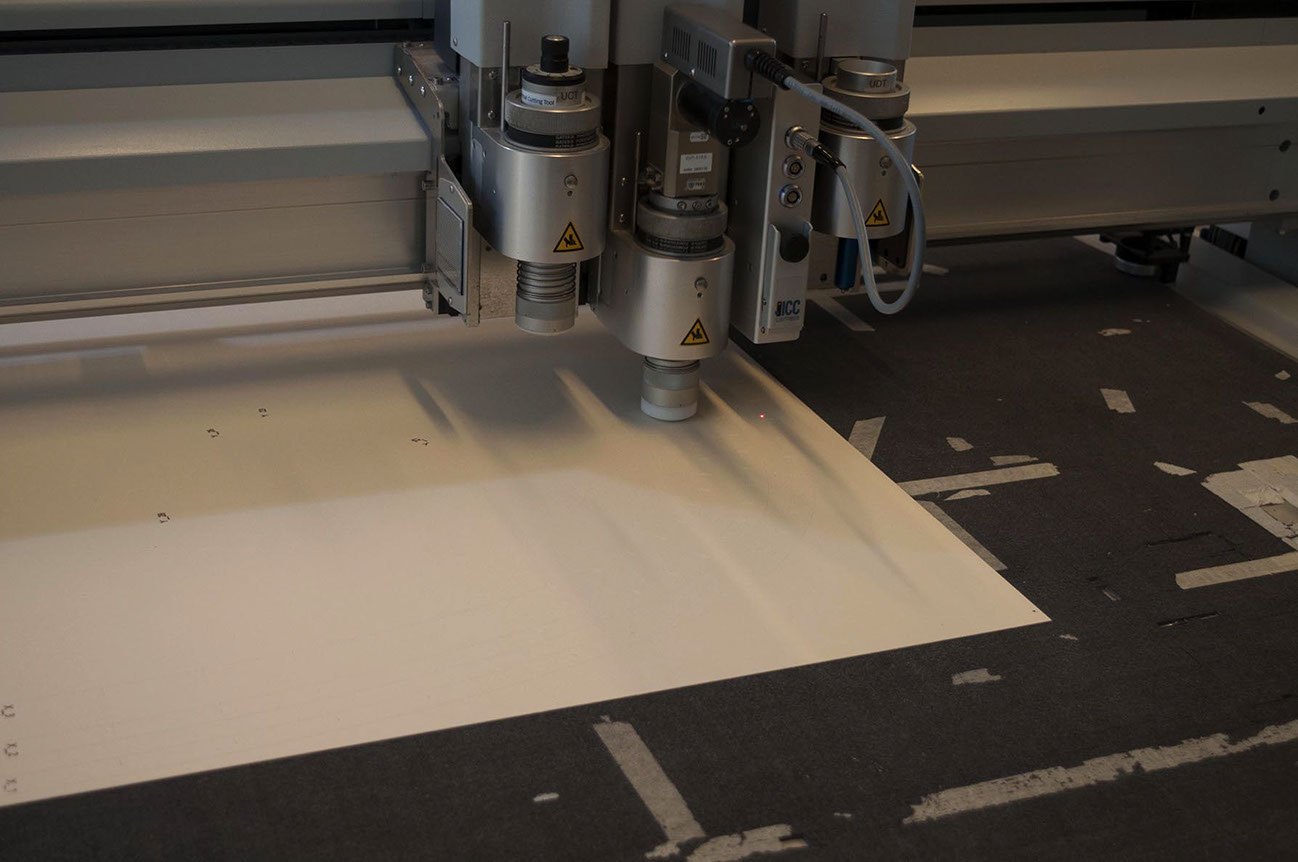
Zund knife cutter in action


Assembly Process
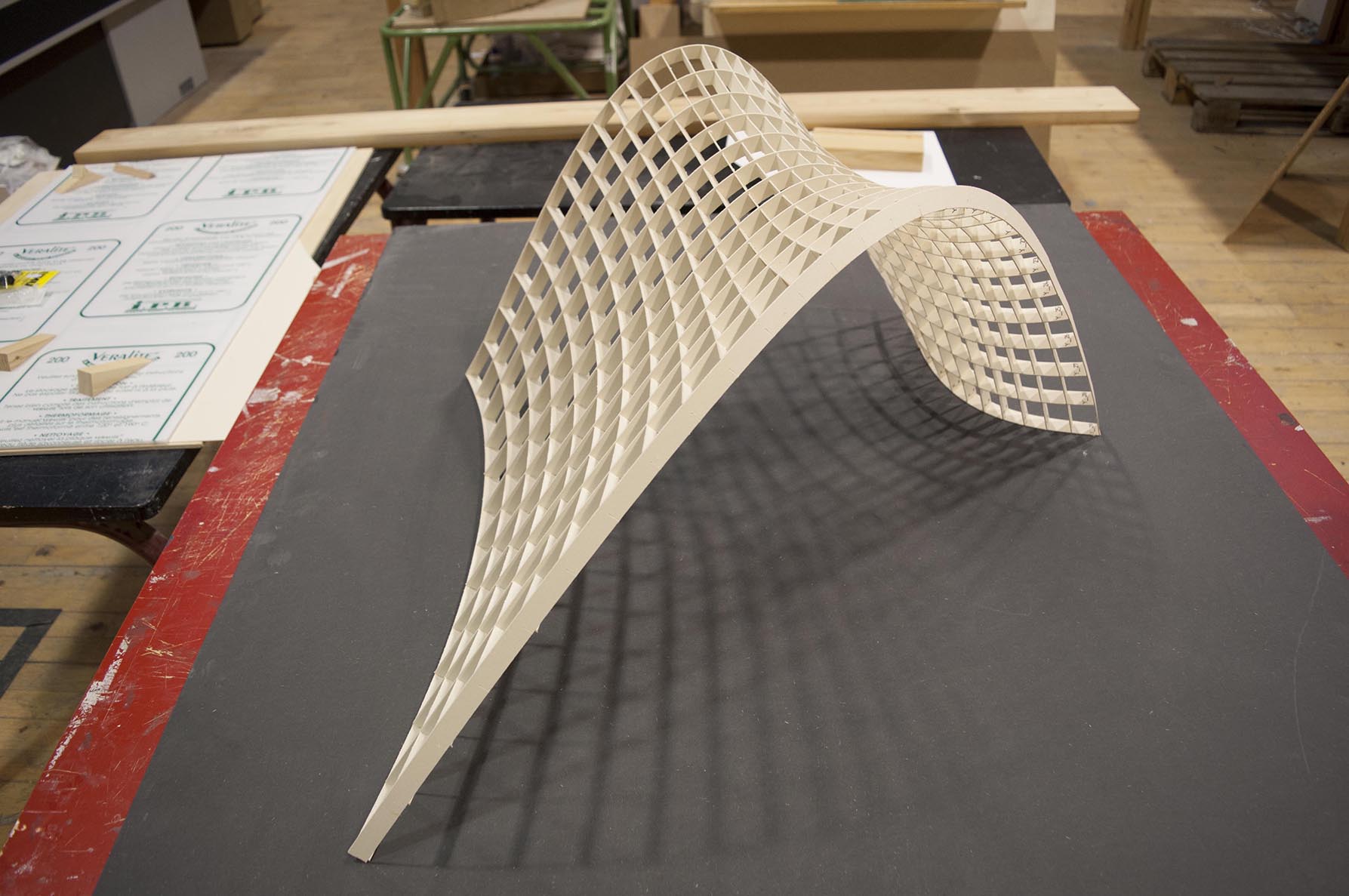
Final assembled model
112 bricks were produced by 6 sided finishing. The process can be seen below. Me and Dhriti Nadir were responsible for developing the MOD file and RAPID generation of each brick. We handled the robot in case of some skewed brick.
The bricks were produced by Alexander Fagerholt and Odin Olesen.
Assembly was done by Urvi, Katherine, Sofie & Niklas mainly while other students also joined as per their availability.

Alex and Odin overseeing the process

Partial Assembly

Wooden Base and the base blocks

Some of the Skewed blocks

Final Assembly Stage

Uneven interior but planar faces

Final aseembled prototype
top

avishek das | 2018