Krab v1.0
Open Source 6-axis Robotic Arm
FabLab CEPT, Ahmedabad, India
2017
All photograph courtesy : Arunima Sen, CEPT University; Unless otherwise mentioned
After the summer school at Aarhus, I got to learn about robotic fabrication in detail including the calculation of Inverse Kinematics of a six axis robot. I had analysed the open code I received during the workshop. I had found in the core of the whole system lies Lobster, written by Daniel Piker which gives out the angle configuration of the each of the 6 joints for a particular end plane position.
Back in my FabLab CEPT, we don’t have any robotic arm or setup. So as part of my Fab Academy 2017 final project, I planned to make an open source robotic arm that would use the Lobster IK to solve the angle configuration & a fablab made electronics boards that will control the motors to reach to those particular configurations. Though it is a small robotic arm with a limited reach, it helps me to experiment with some experimental process.
The project had the following phases. Design and fabrication of robot parts; design of the electronics board and assembly of power, motors and microcontroller; design of a control interface of the robot within Grasshopper. 2 Plugins were used in the process : Firefly and Human.
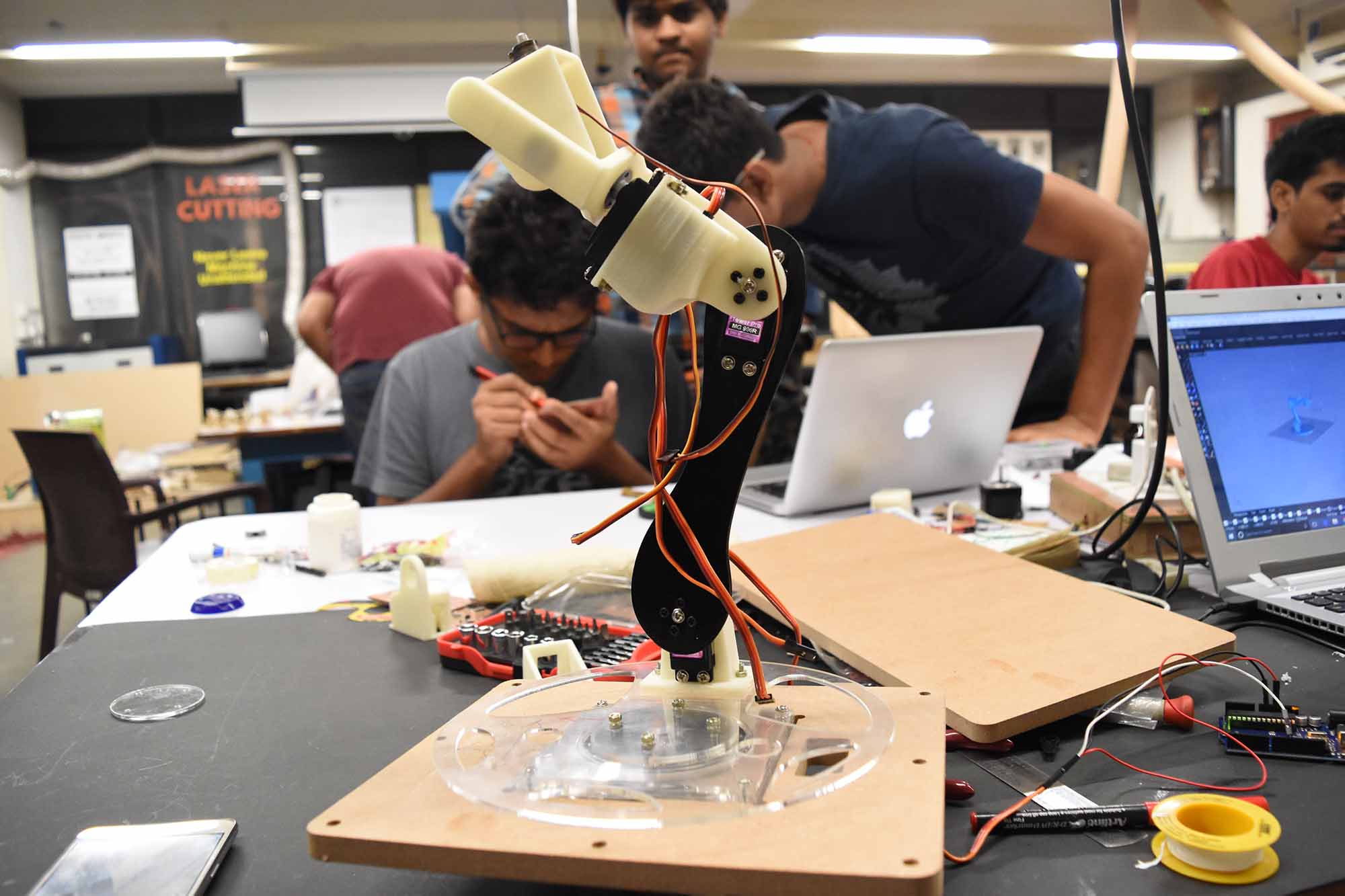
Design of the Robot:
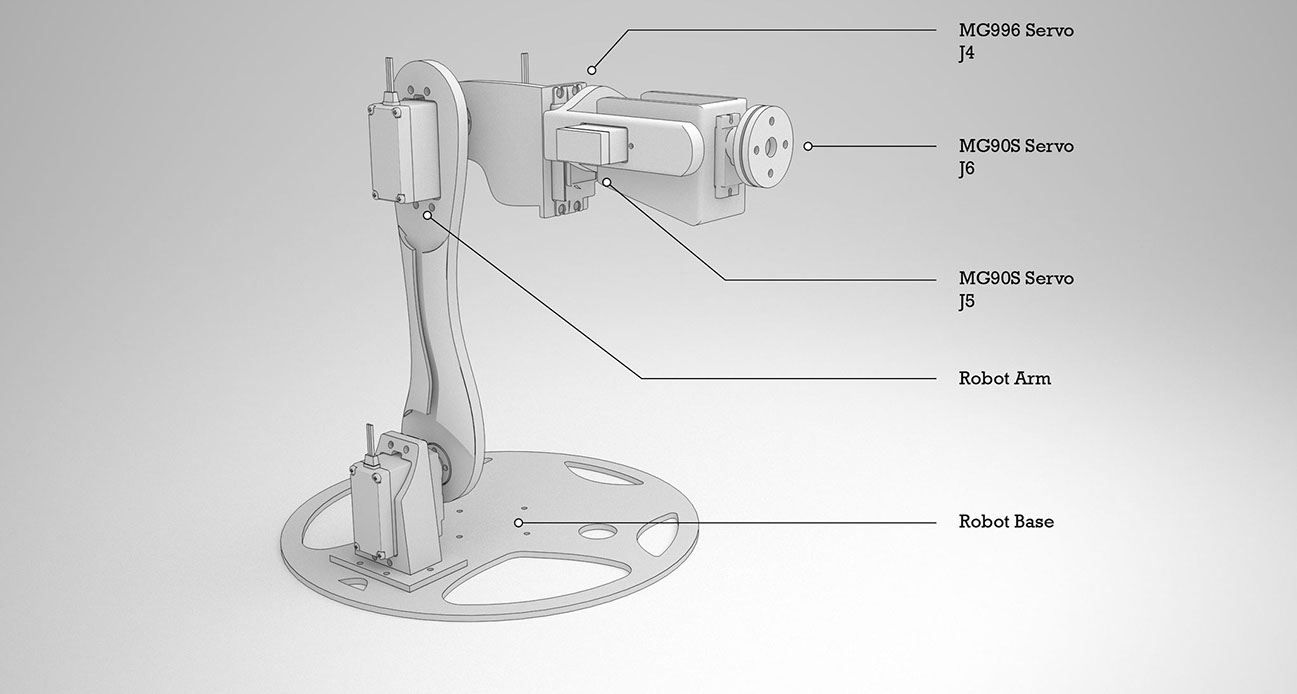
Krab Design
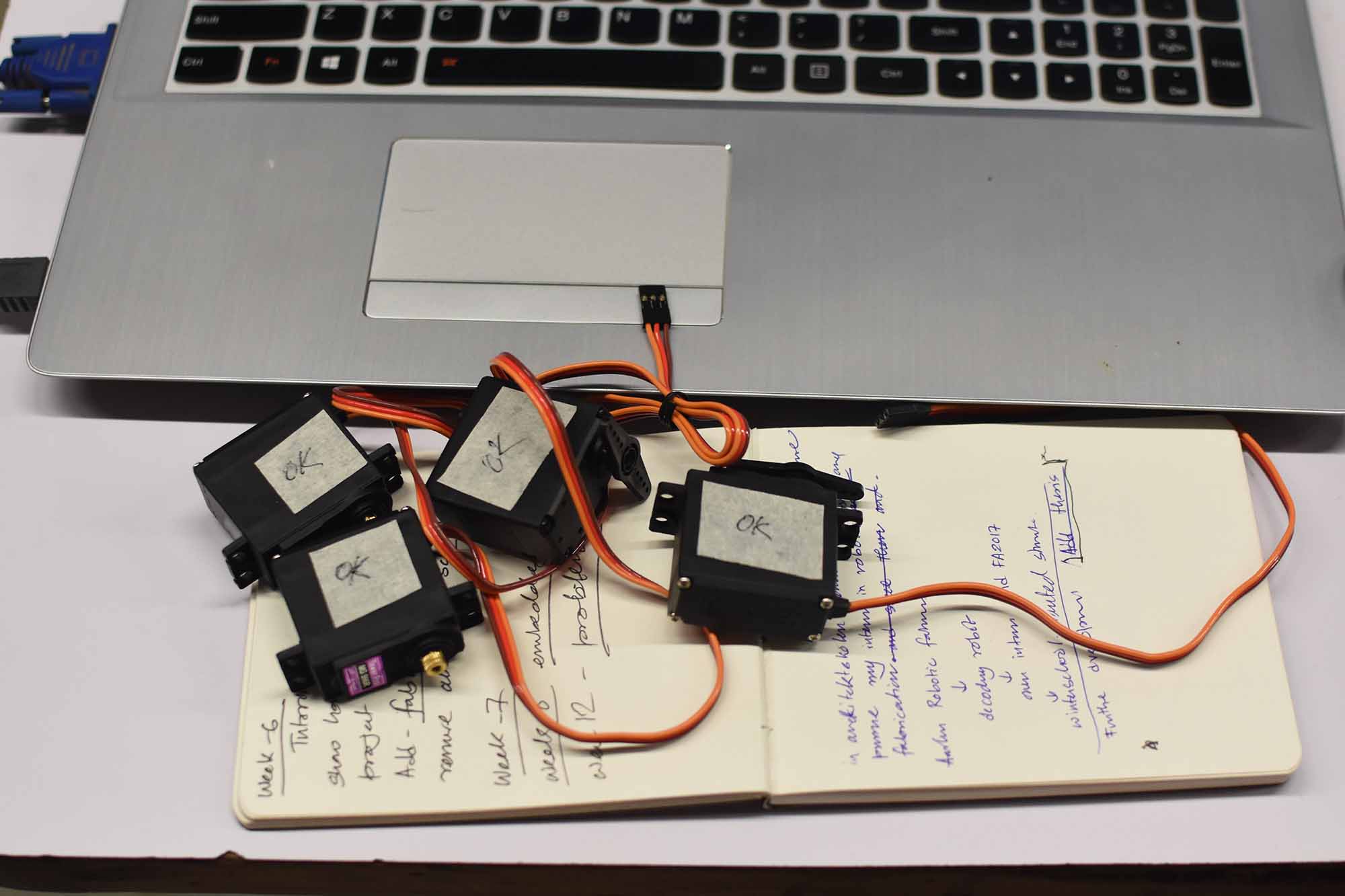
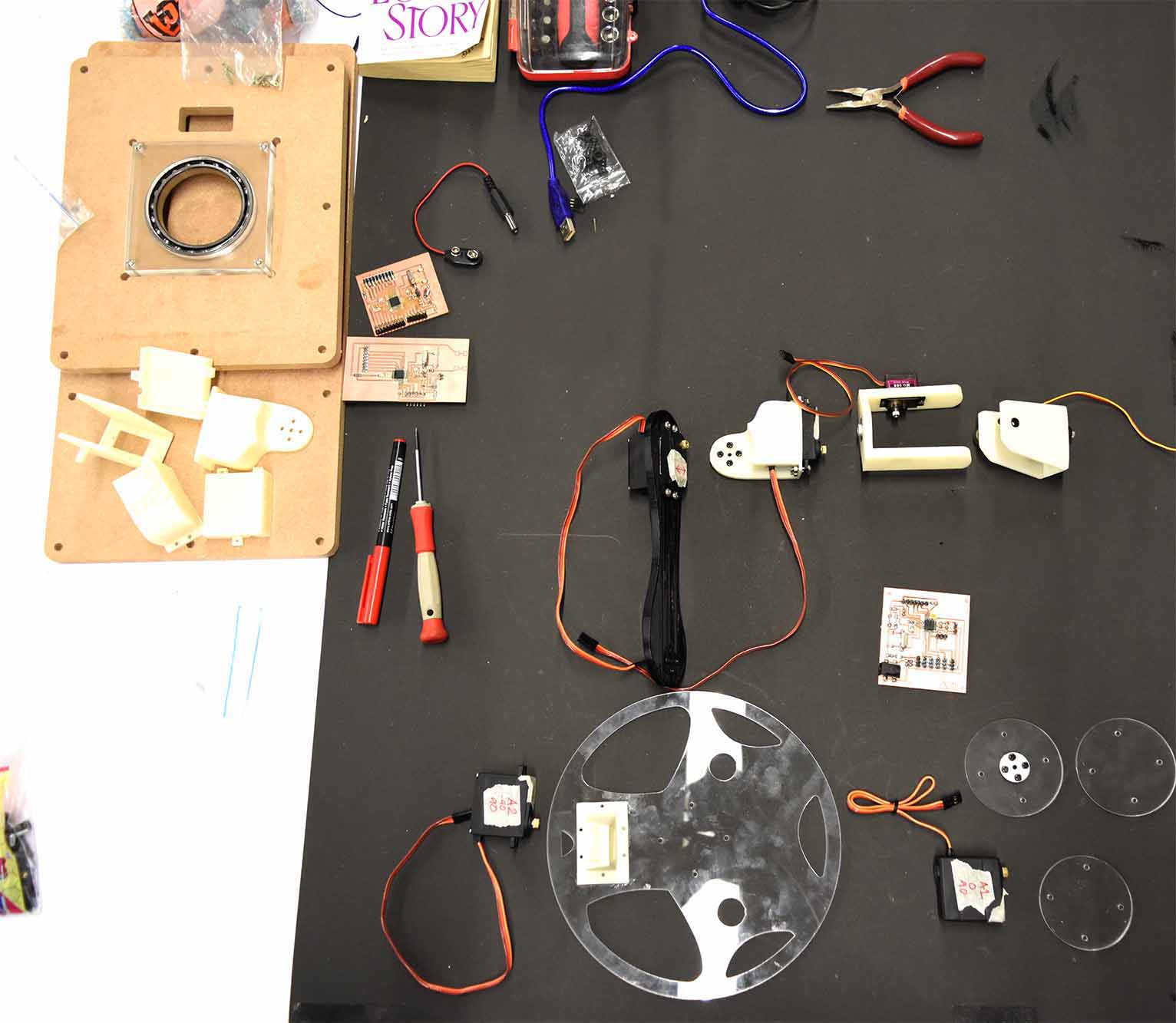
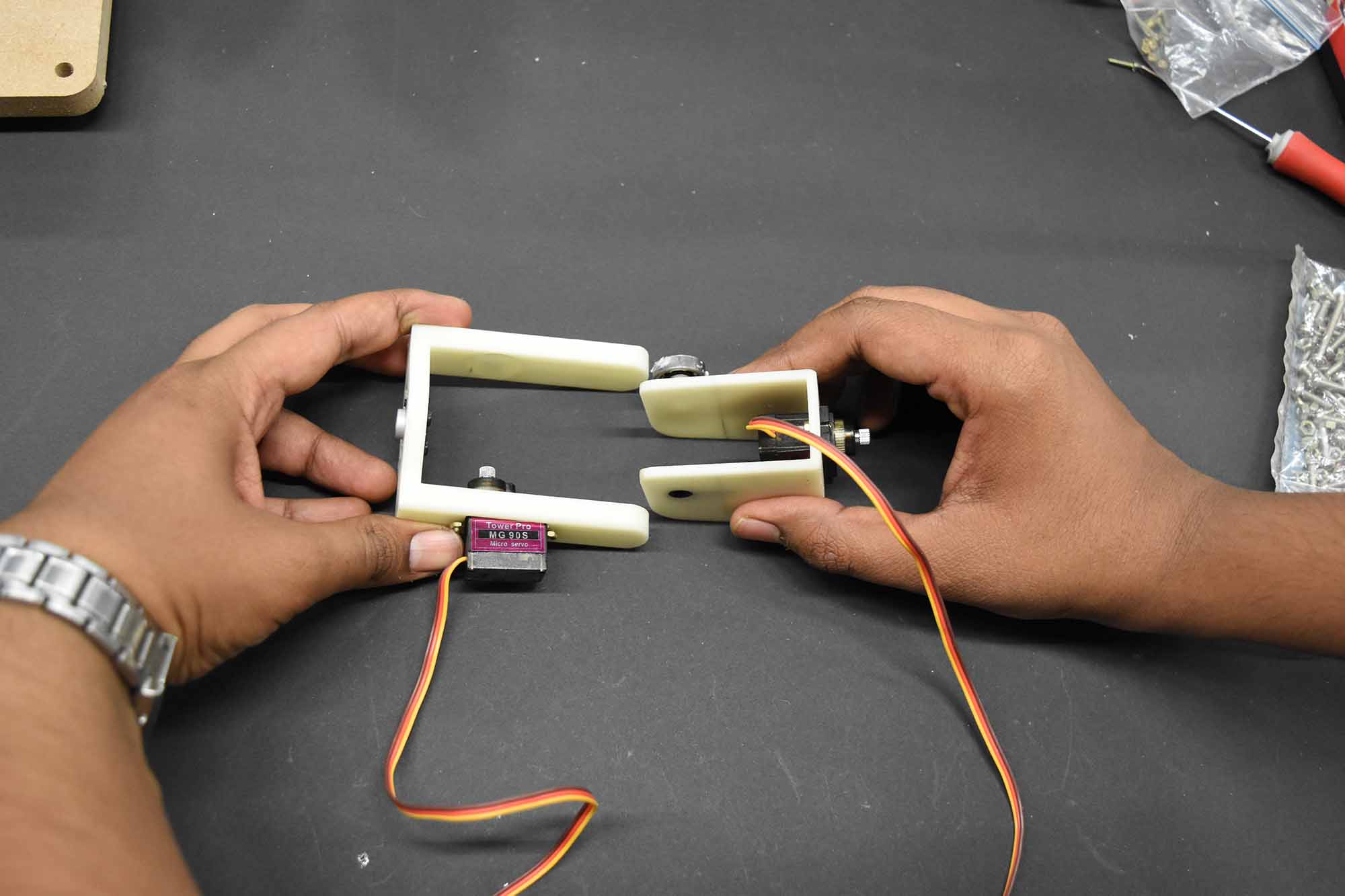
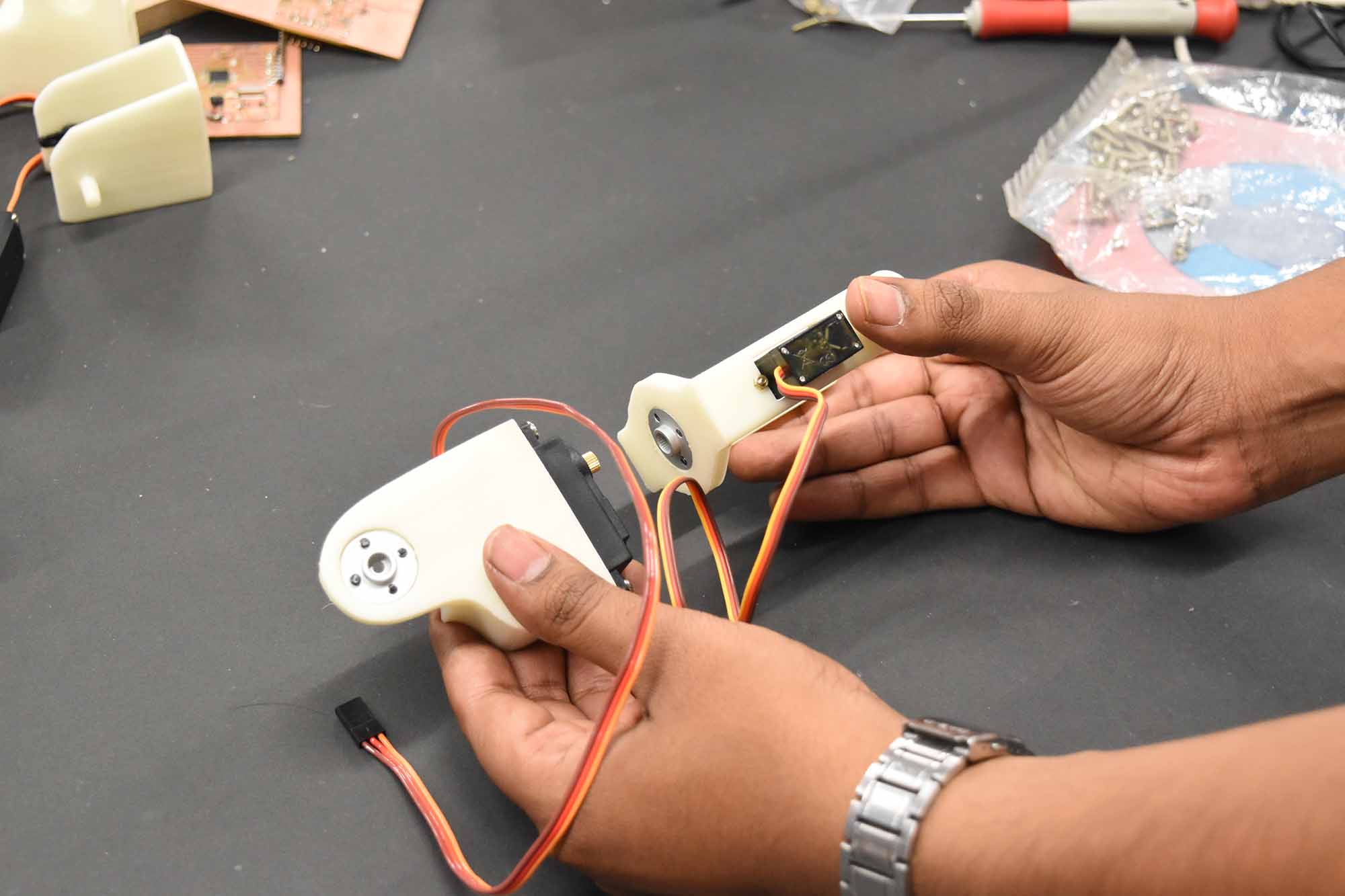
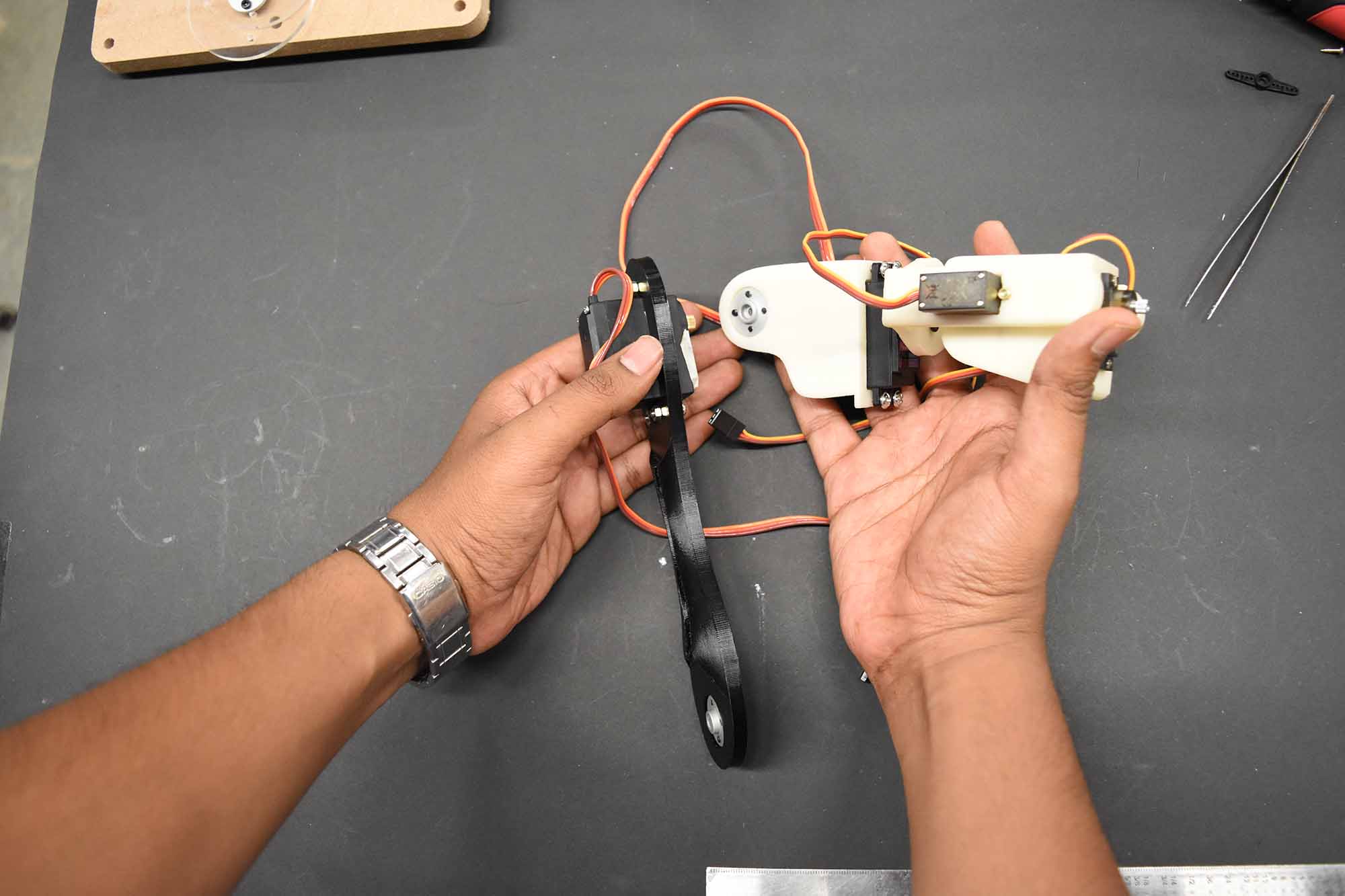
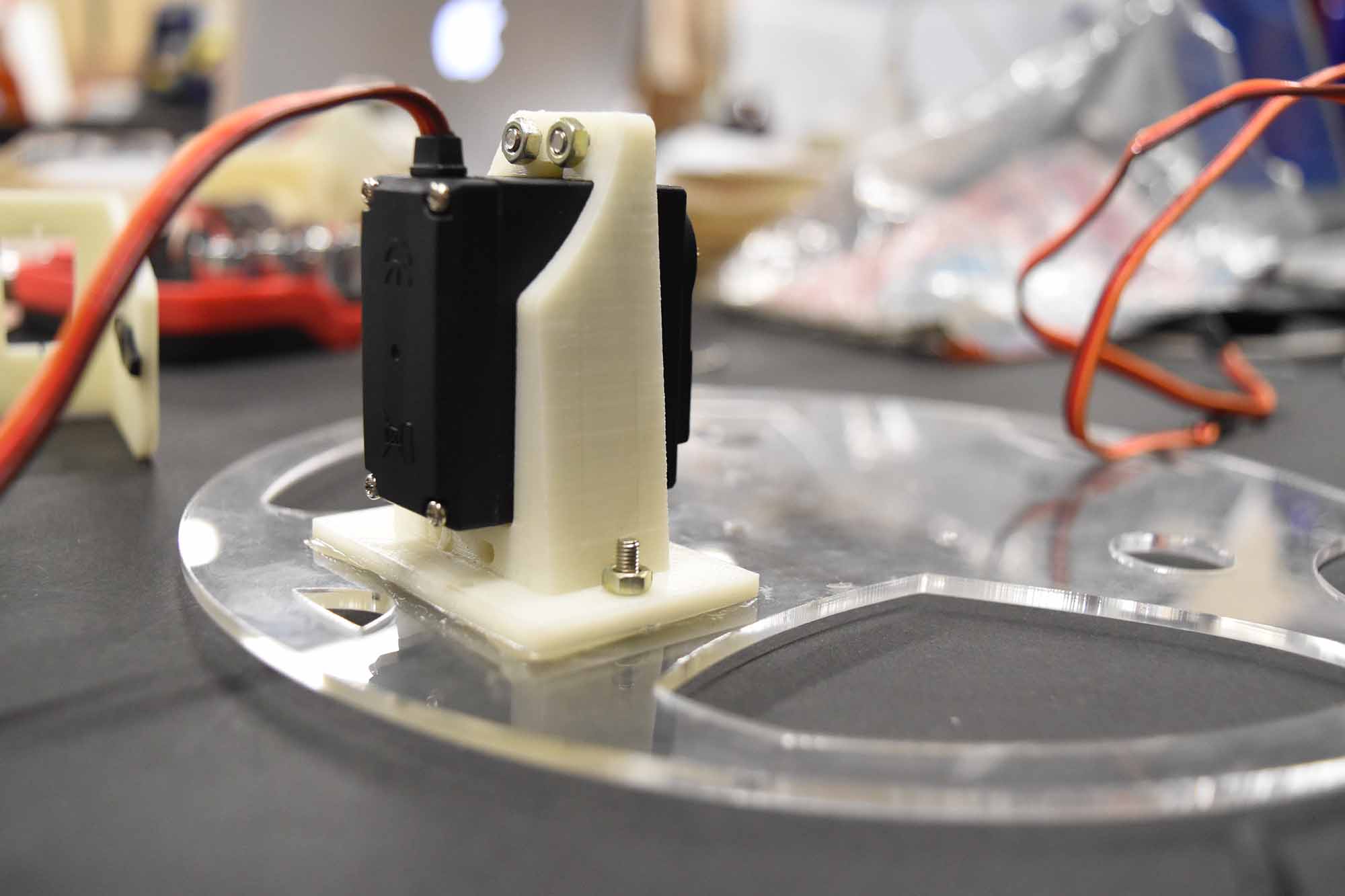
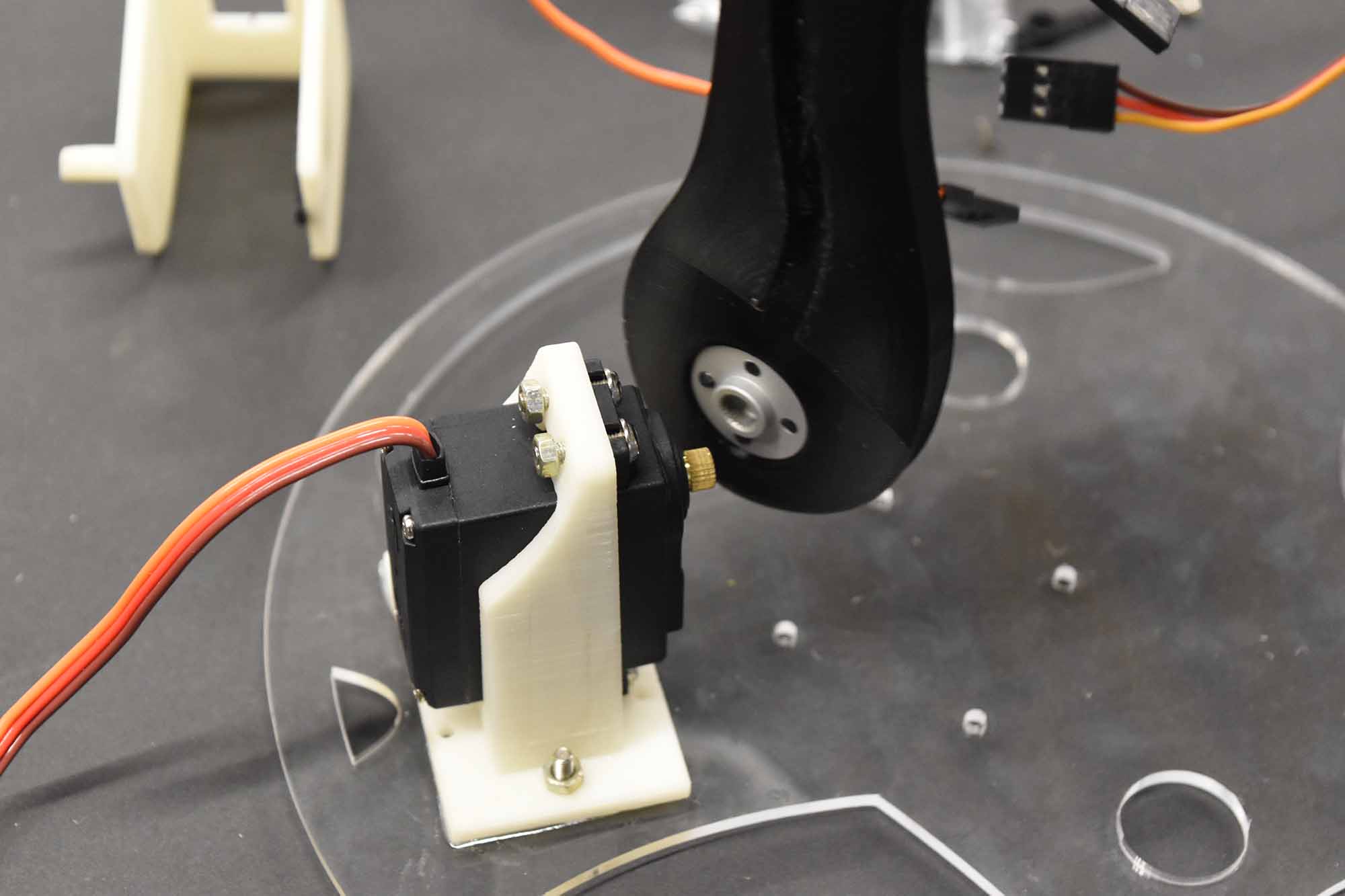
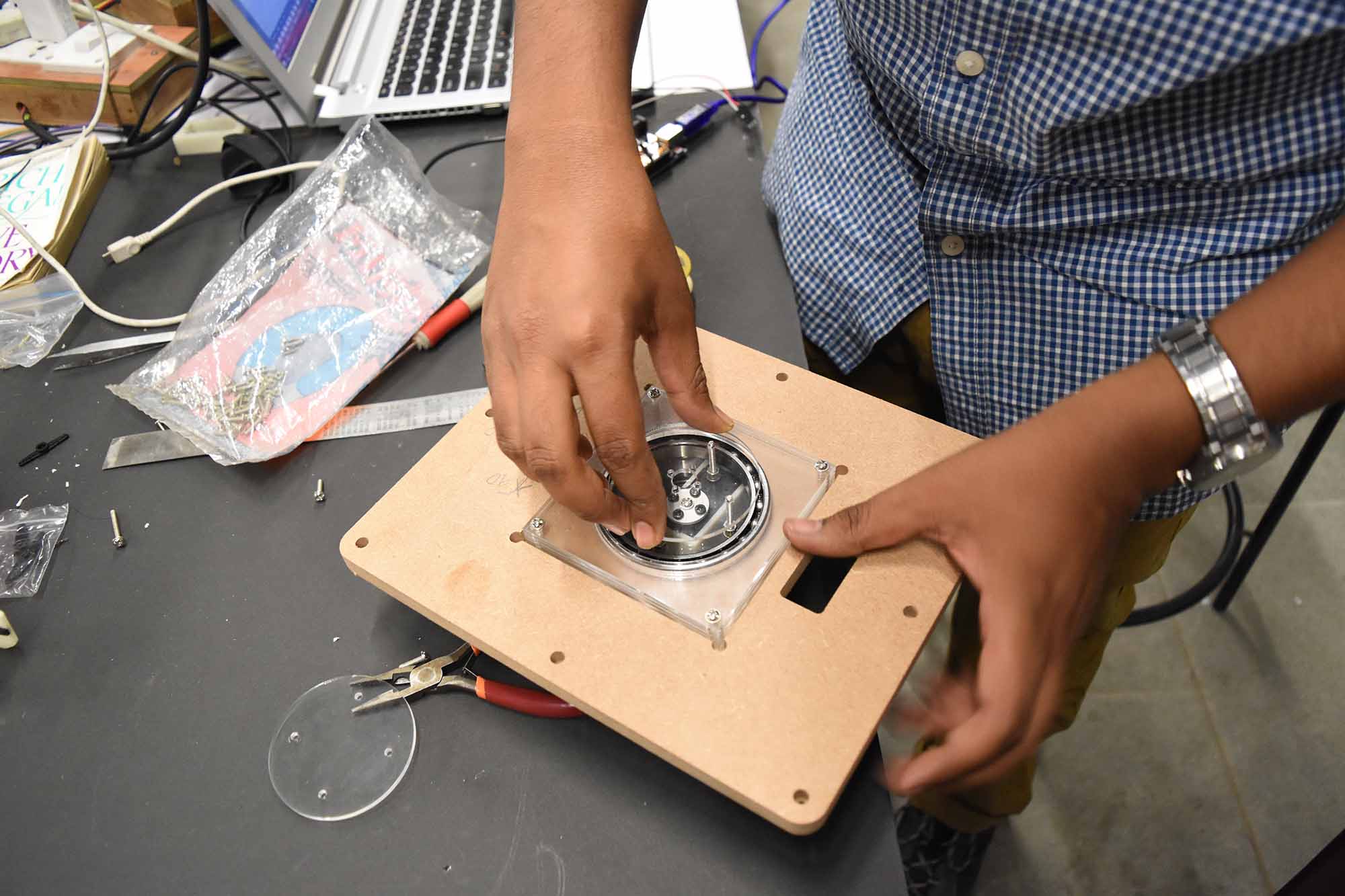
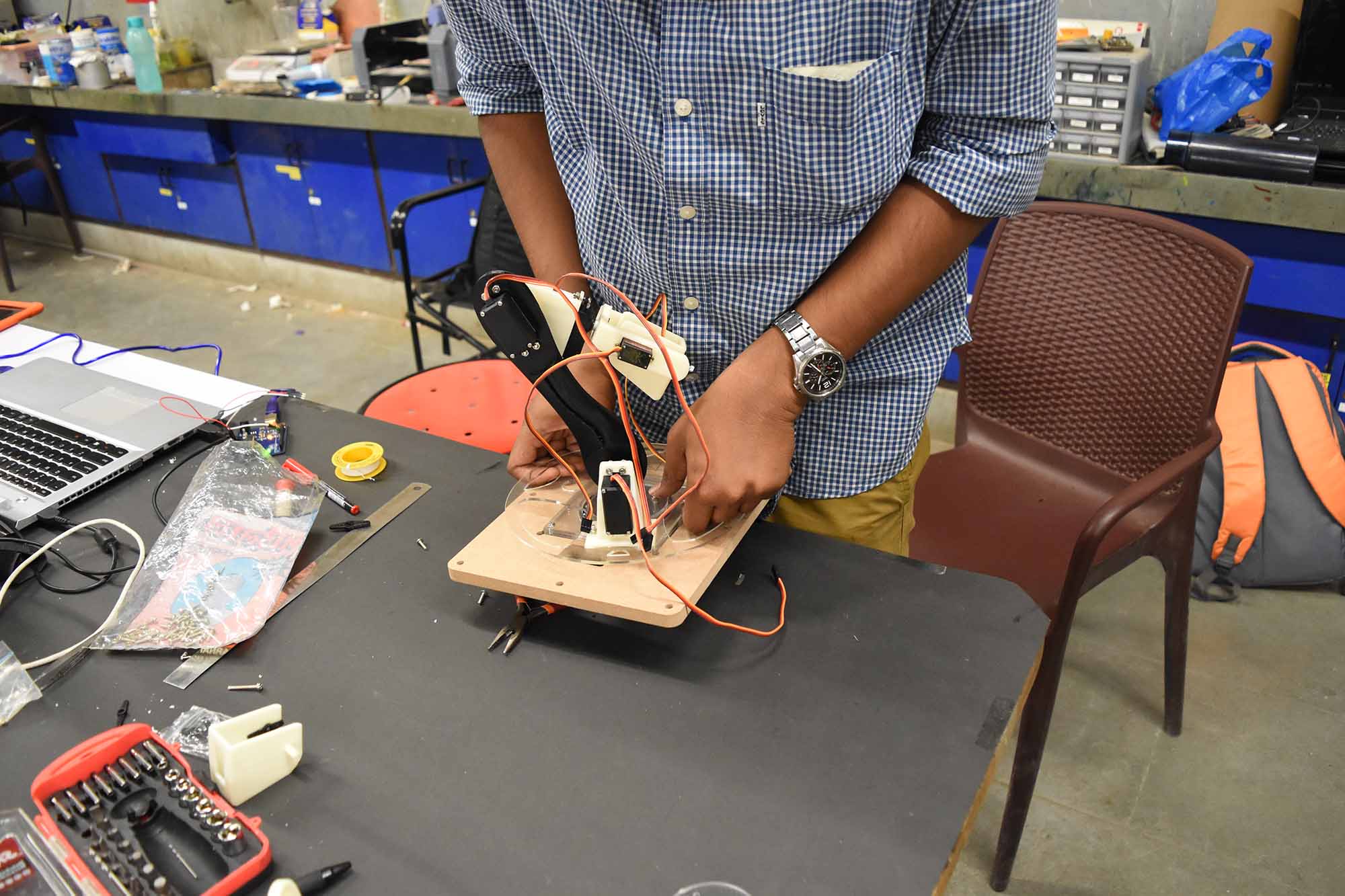
Parts and Assembly:
Once the parts are fabricated and motors are calibrated, parts are assembled for the electronics to put in.
Assembly Sequence:

Electronics:
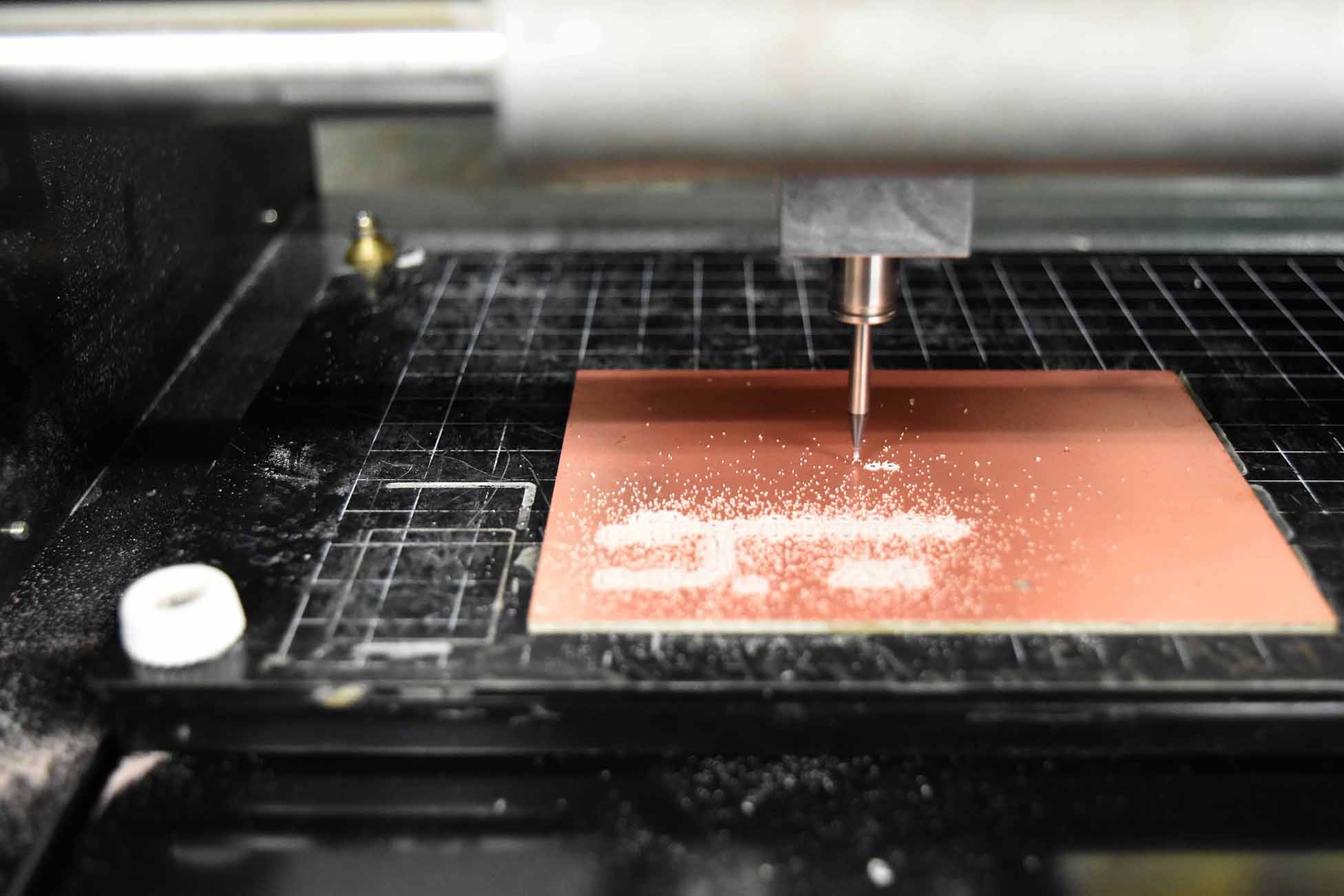
Micromilling the custom designed board
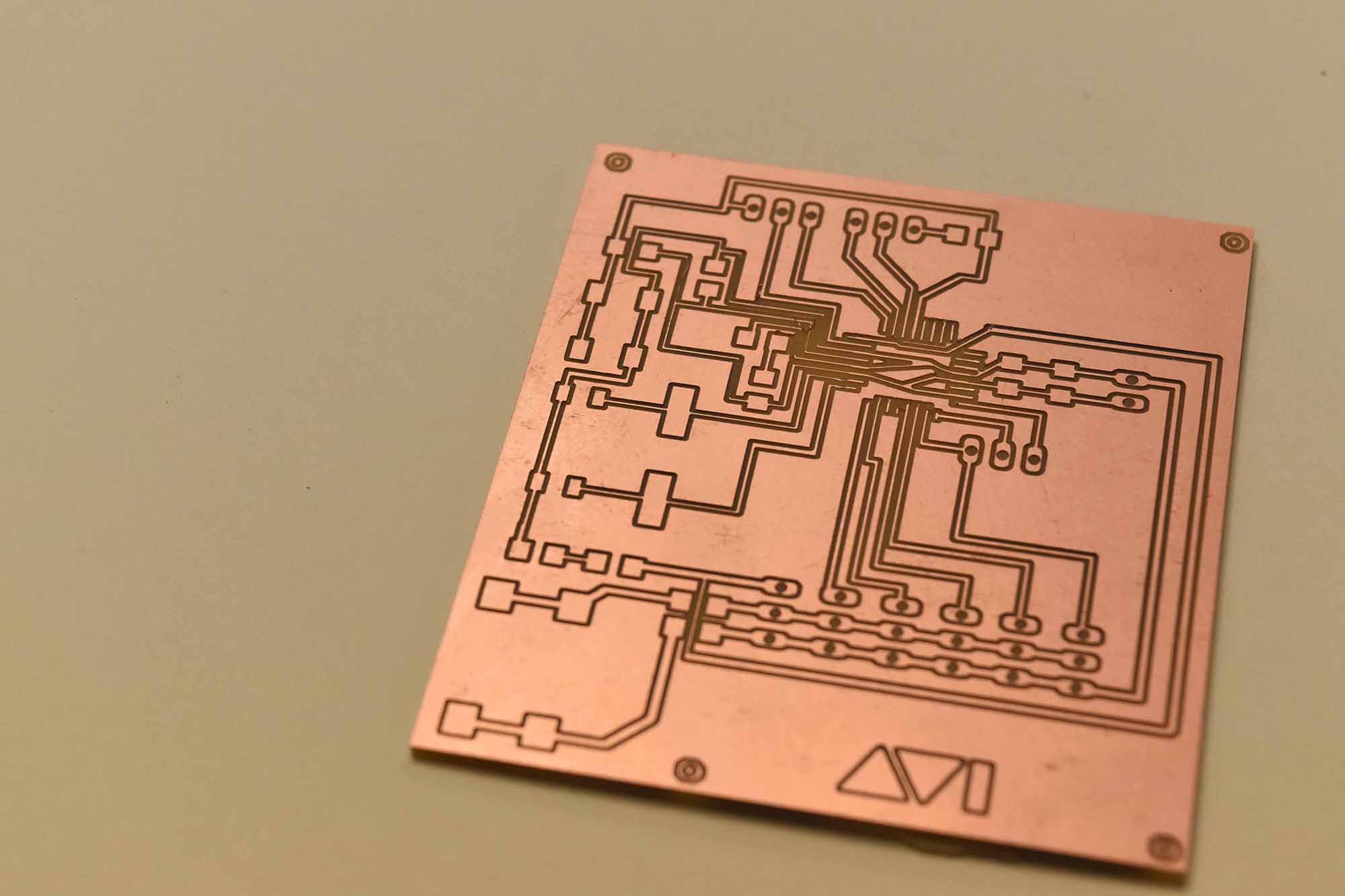
Milled board
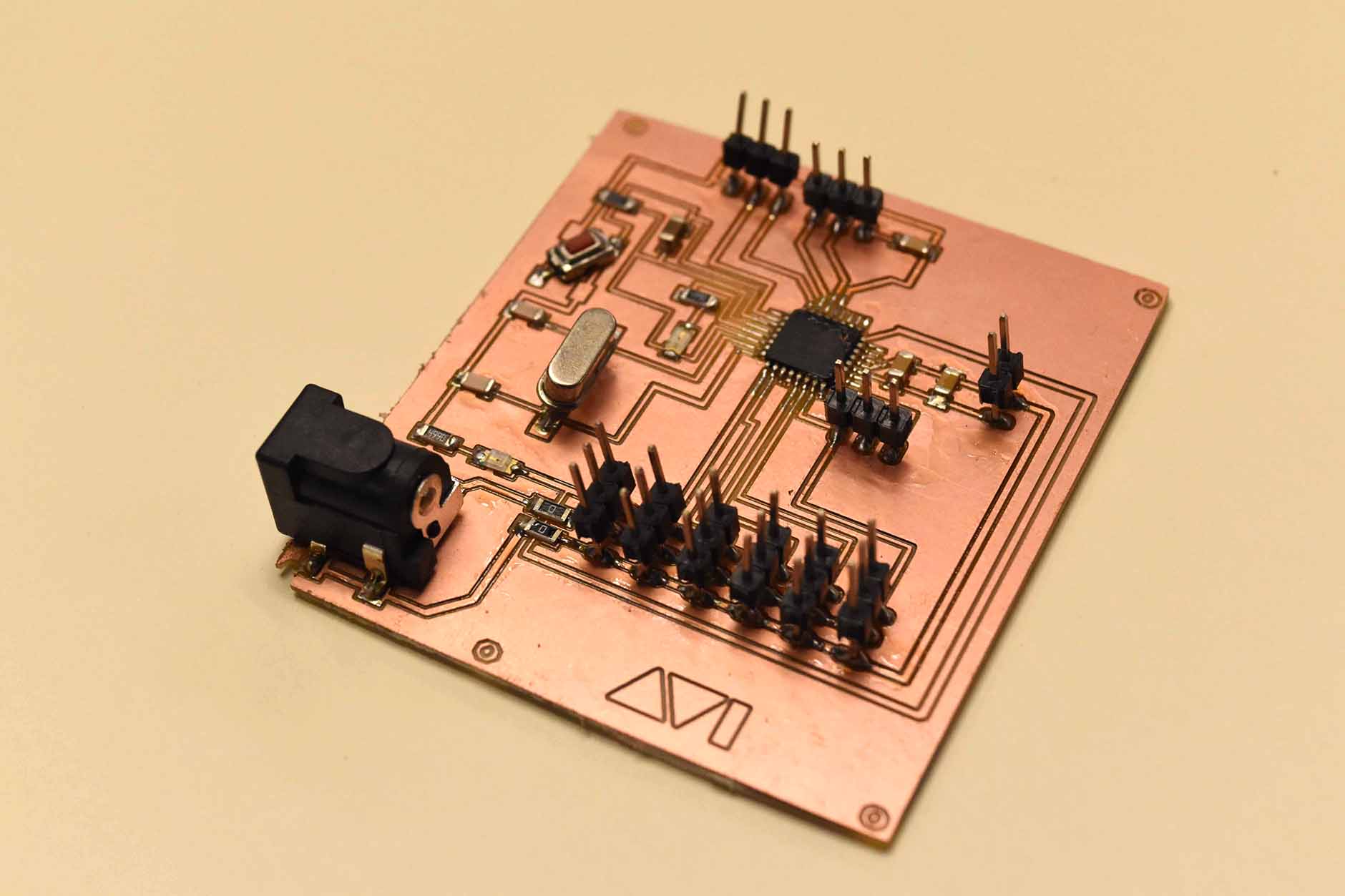
Final Finished microcontroller board
This board can take the bootloader of Arduino Uno and behave like one. So the Grasshopper will communicate using the Firmata protocol to communicate with the board real time and run the motor acordingly.
Interface:
The interface was designed using Human which makes HUD with real time data.
Interface using Human and Custom python components for display
top

avishek das | 2018